科技有限公司")

摩托车闯禁行抓拍
- 摩托车闯禁行抓拍 摩托车闯禁行抓拍系统主要利用现有抓拍前端(没有需建设),对抓拍的区域进行智能分析,实现对通行摩托车违章信息实时读取……
产品详细
摩托车闯禁行抓拍
摩托车闯禁行抓拍系统主要利用现有抓拍前端(没有需建设),对抓拍的区域进行智能分析,实现对通行摩托车违章信息实时读取、实时抓拍、违法数据实时上传。

研发背景
由于南北方的环境差异,南方气候温和,很多人选择骑摩托车出行,这样既方便又不会堵车,从而导致摩托车保有量逐年增长,快速路上非法行驶的摩托车也越来越多。尽管交通管理部门也出台了相关交通规则,但是大部分摩托车依旧在公路上的各个车道随心所欲地快跑,交通事故频发,据统计今年交通事故死亡率 50%来自于摩托车,安全隐患剧增,为交通管理带来又一大难题。
针对此现象公司通过整合自身软件研发优势和集成能力,为摩托车行业提供全面、安全、稳定的解决方案,实现非法行驶在快速路上的摩托车进行抓拍、治理、视频实时监控等功能,为广大群众出行带来便利,通过打造摩托车高清抓拍系统为交通管理部门提高管理水平、提升城市形象、合理应用资源提供有力的帮助。
系统原理
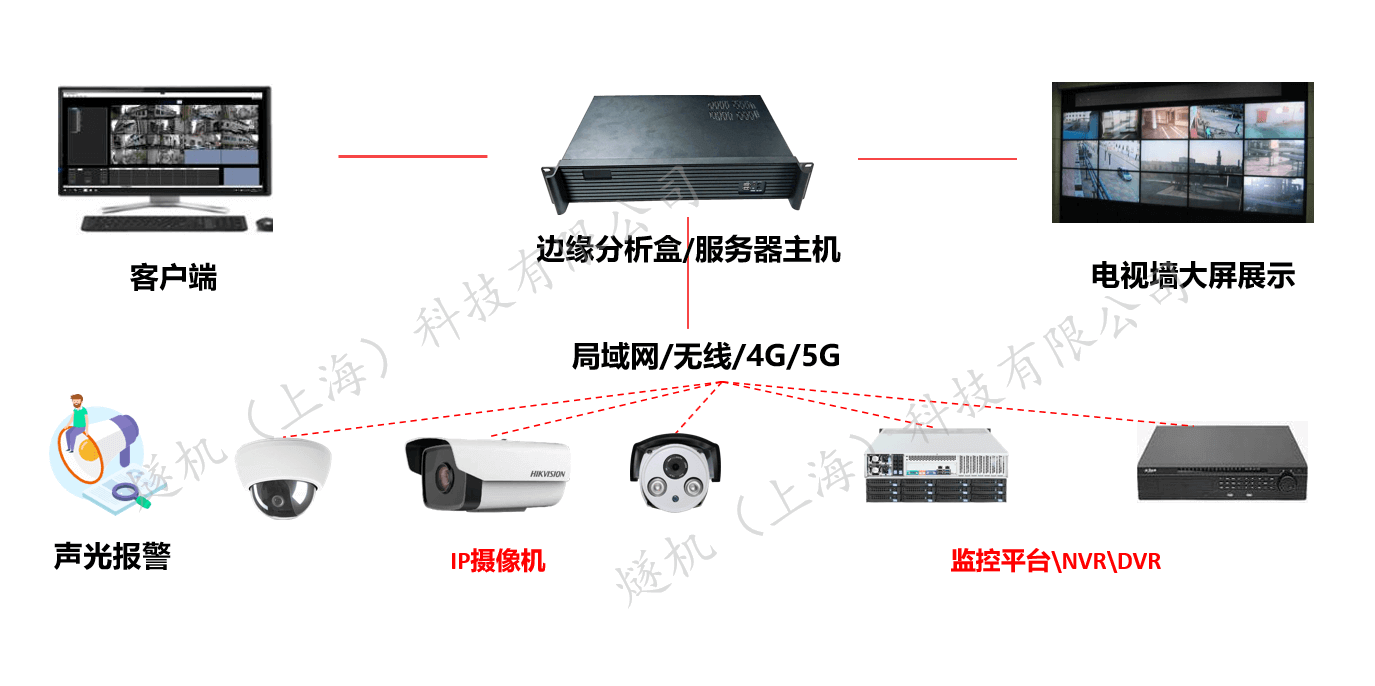
摩托车闯禁行抓拍系统主要利用现有抓拍前端(没有需建设),对抓拍的区域进行智能分析,实现对通行摩托车违章信息实时读取、实时抓拍、违法数据实时上传。系统支持中心模式和前端模式:中心模式服务器安装于机房,直接运行在指挥中心的机房里面,不需要在路口放置任何机器设备;前端模式服务器安装于前端配电箱内;整个系统达到方便维护、故障率低、易于使用、便于安装等优点;此外,系统兼容性强、适用面广,能兼容各厂家的前端设备。
整个检测过程分为以下几个步骤:
1、由高清摄像抓拍主机获取实时的视频流。
2、利用背景差分算法检测运动前景。首先通过初始多帧视频图像的自学习建立一个背景模型,然后对当前帧图像与背景模型进行差分运算,消除背景的影响,从而获取运动目标的前景区域。
3、根据背景差分运算中运动目标检测的结果,有选择性地更新背景模型,并保存背景模型。
4、过滤噪声,并获取准确的车辆位置。
5、运用时空信息、匹配和预测等算法,对车辆进行准确的跟踪,得到车辆对象的运动轨迹,并保存车辆对象的轨迹信息。
6、判断车辆是否到达触发线位置,如是没有到达,则进行下一帧的检测,如果到达则发出触发信号。
车辆的抓拍触发综合运用了车牌检测算法和车辆检测算法。
工作流程
- 1) 前端抓拍设备实时上传视频流至系统服务器。
- 2) 摩托车闯禁行抓拍系统实时读取视频流,并进行分析。
- 3) 通过http推送,后台消息,现场音箱广播的方式提醒现场人员及时改正。
其他算法点击:算法中心







